My Projects
These are some of my academic projects which include Medical Devices, Electro-Mechanical Devices, Product Design & Development
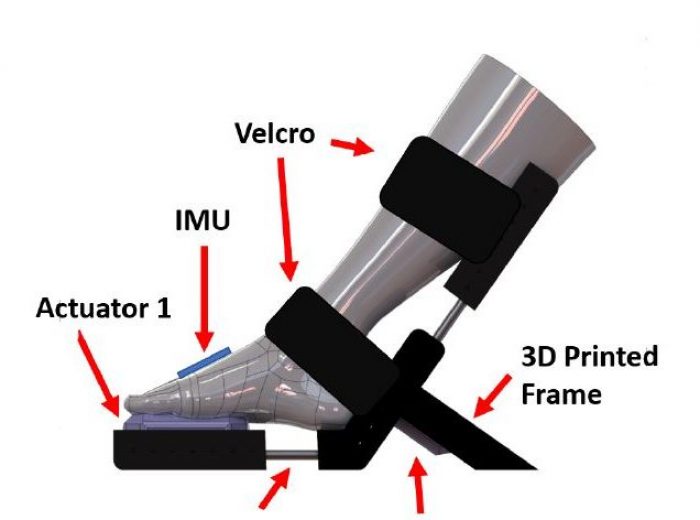
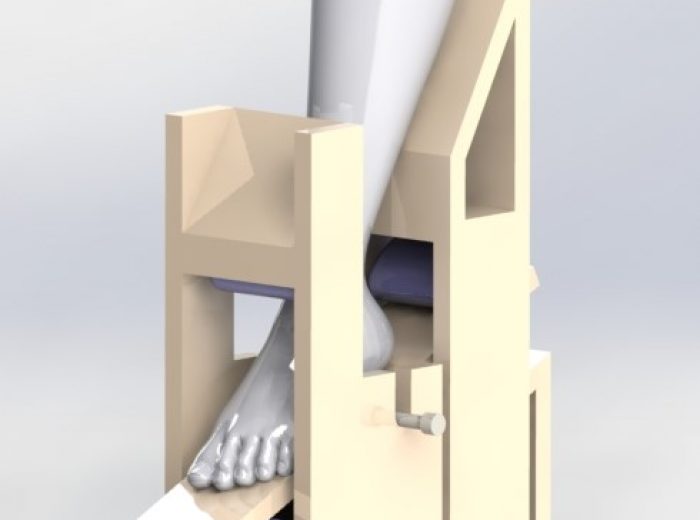
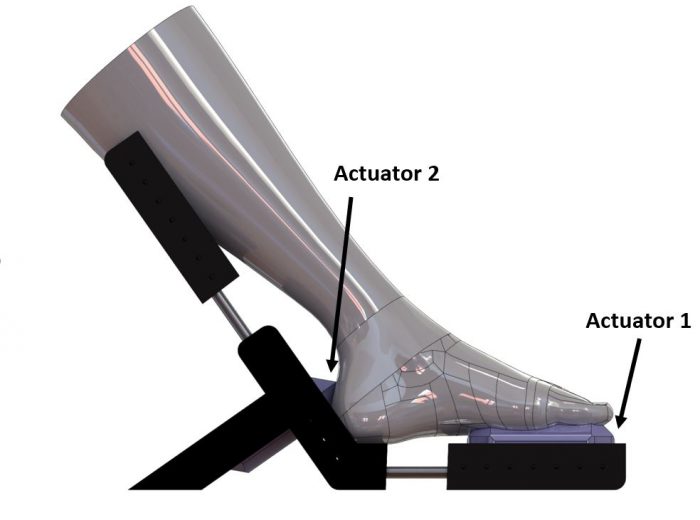
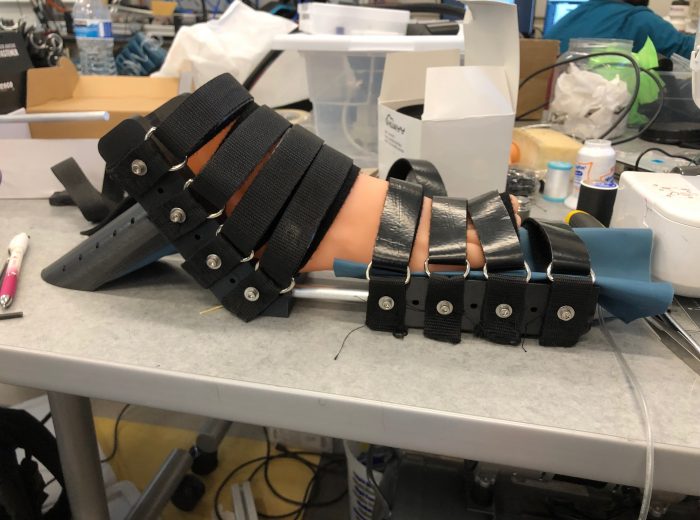
A Wearable Soft Robotic Medical Device to Treat Plantar Flexion Contractures in Brain Injuries
Plantar flexion contracture (PFC), a painful condition where the ankle remains in a plantar flexed state, is common in patients who have suffered from traumatic brain injury, acquired brain injury or stroke. PFC makes it difficult for patients to walk, reduces their range of motion & causes gait changes. Current treatments for PFC, serial casts made of rigid and uncomfortable materials or adjustable splints, can’t be used for extreme PFC cases & may result in pressure wounds and skin abrasions. This soft, conformable & reusable device provides a prolonged plantar flexion stretch at the ankle to reduce spasticity, stiffness & subsequently increase range of motion.









Design of Amphibian Exploration Rover (AER)
The Amphibian Exploration Rover (AER) is designed to be deployed in unexplored territories comprising land and water. Envisioned to effortlessly transit between the terrains and water bodies, the AER is equipped with hybrid wheels and a rocker-bogie mechanism. The notion being, to design an effective and stable mechanism as opposed to a wheel-propeller combination to steer through both terrains. For this purpose, the wheels are designed in such a way to develop a thrust force to propel through the water bodies. Effectively, the need to eliminate drag due to the submerged wheels is fulfilled via the proposed mechanism. Moreover, the stable rocker-bogie assembly will assist the AER to traverse on rough terrain with ease. Intended to operate in remote areas, the AER can be controlled from anywhere via the internet. Additionally, to study the various physical parameters of the surroundings, different sensors to measure Temperature, Humidity, and Gas Concentration along with Obstacle Detector are interfaced with the AER.
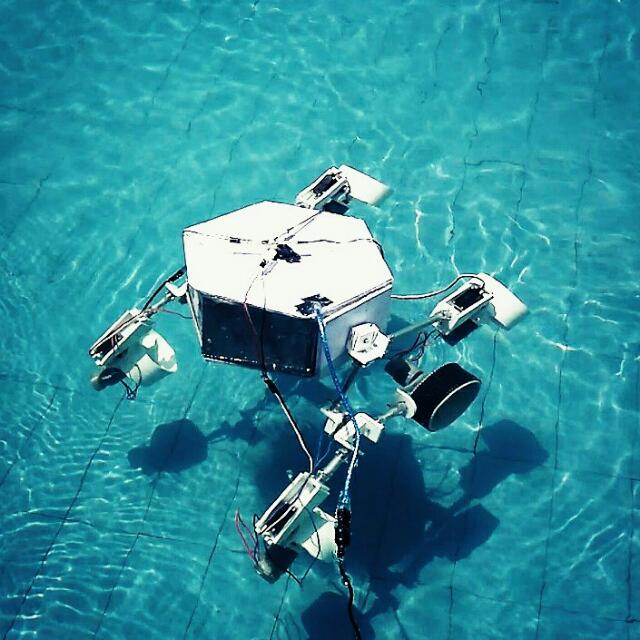
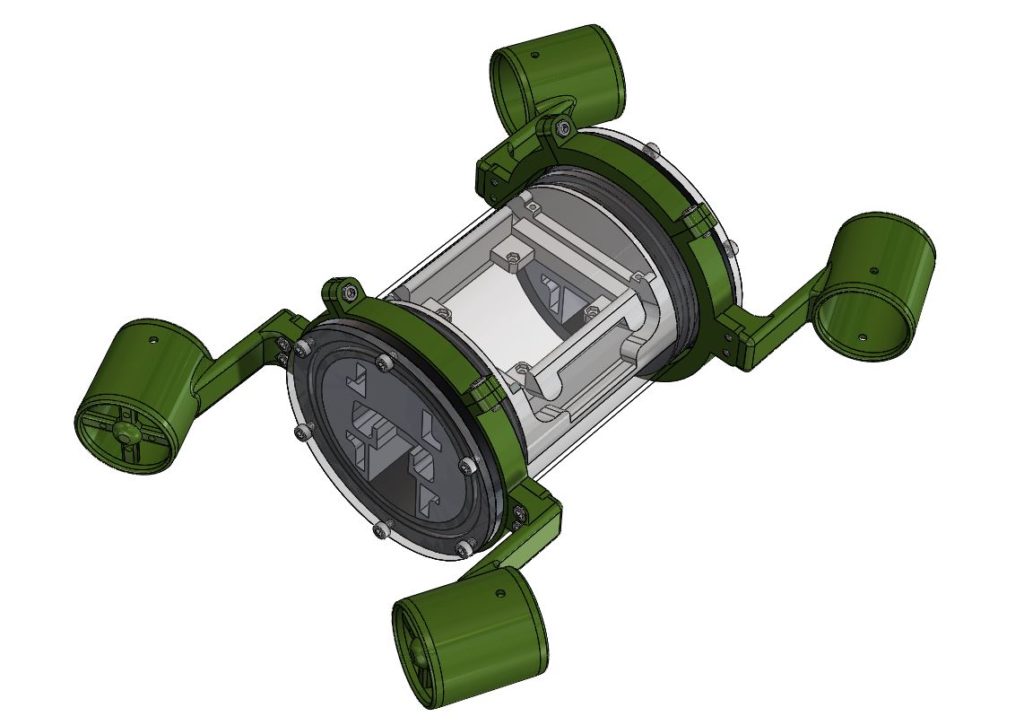
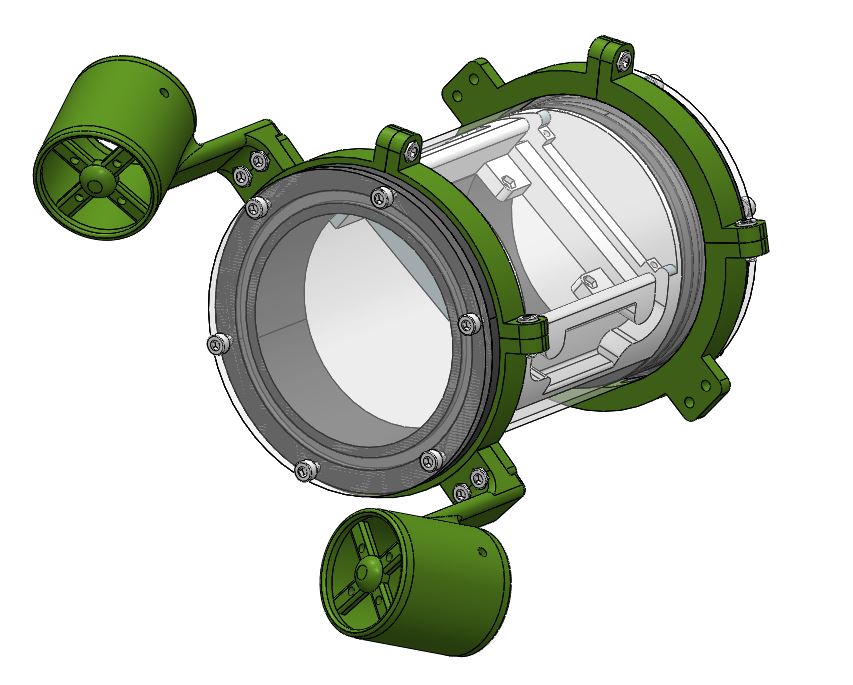
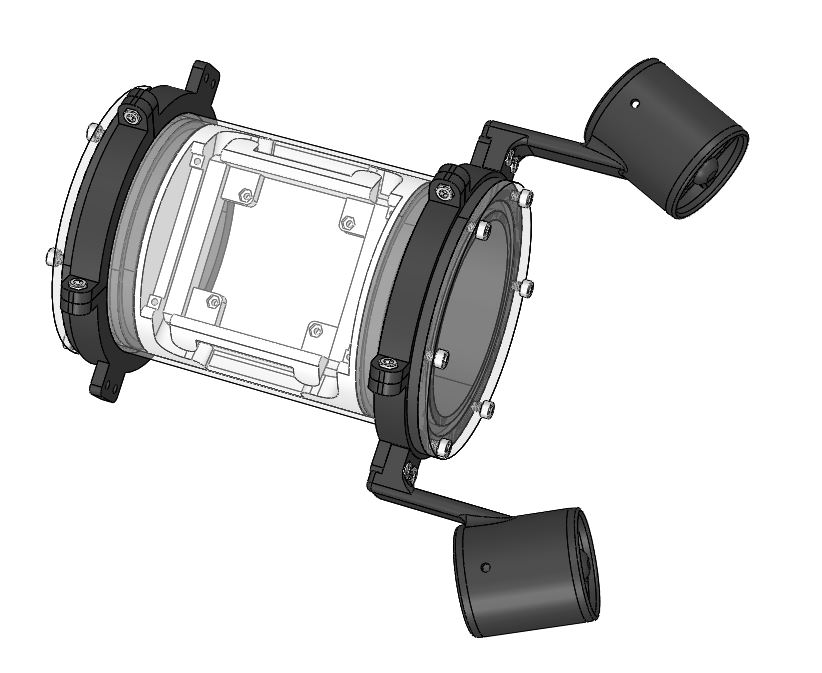
Development of an Autonomous Submersible Robot for Water Quality Inspection
Cleaning and purification of water is very essential for good health and environmental purposes. For the water quality inspection and its purification, we proposed an autonomous underwater submersible robot that is very compact and can operate in a short-range workspace. The submersible robot will autonomously maneuver inside the provided workspace and collect water samples for the quality inspection. Autonomous operations will minimize the involvement of human operators, which is expected to lower the cost of water quality inspection.
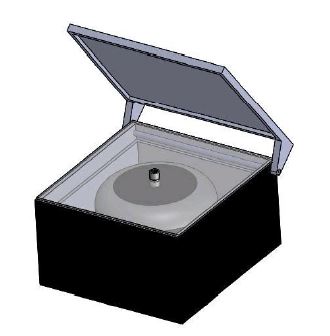

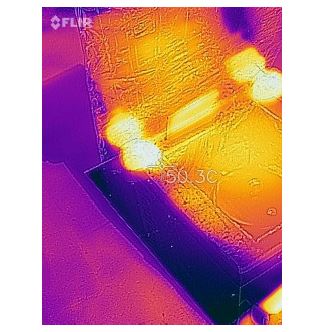
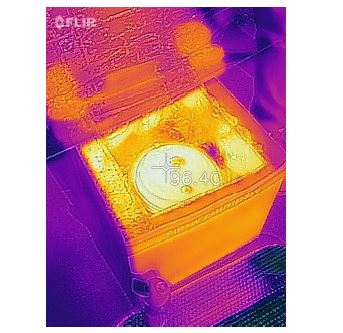
Design & Test of Solar Powered Autoclave Which Sterilizes Medical Equipments without the Use of Electricity
Hospitals in underdeveloped areas around the world lack proper sterilization. This results in the occurrence of surgical site infections, which results in numerous deaths. The proposed device, called Sparky Solar Sterilizer, is a solar powered autoclave which sterilizes without the use of electricity. The system is pre-assembled and can be set up to run in few minutes. A pressure cooker is used to sterilize the equipments using pure steam at high temperature. The design is made to absorb maximum sunlight with fewer complex and moving parts. In addition to that, the materials used for this project are inexpensive and readily available.
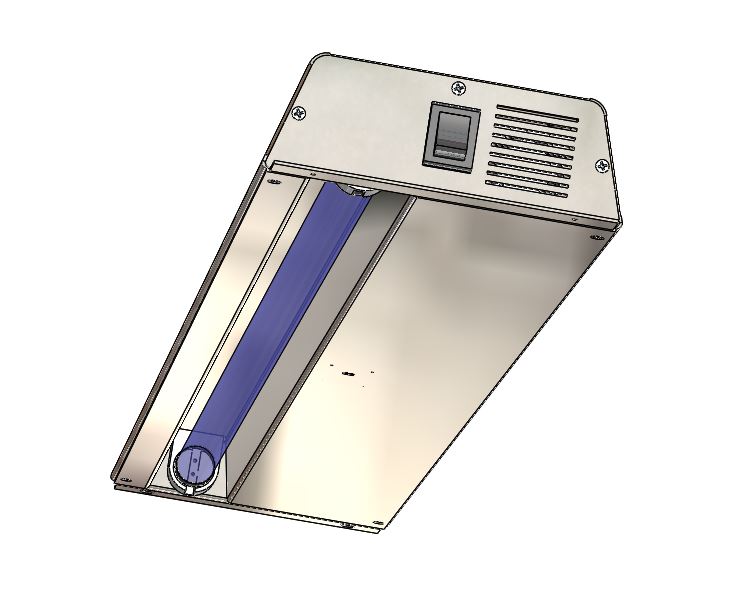
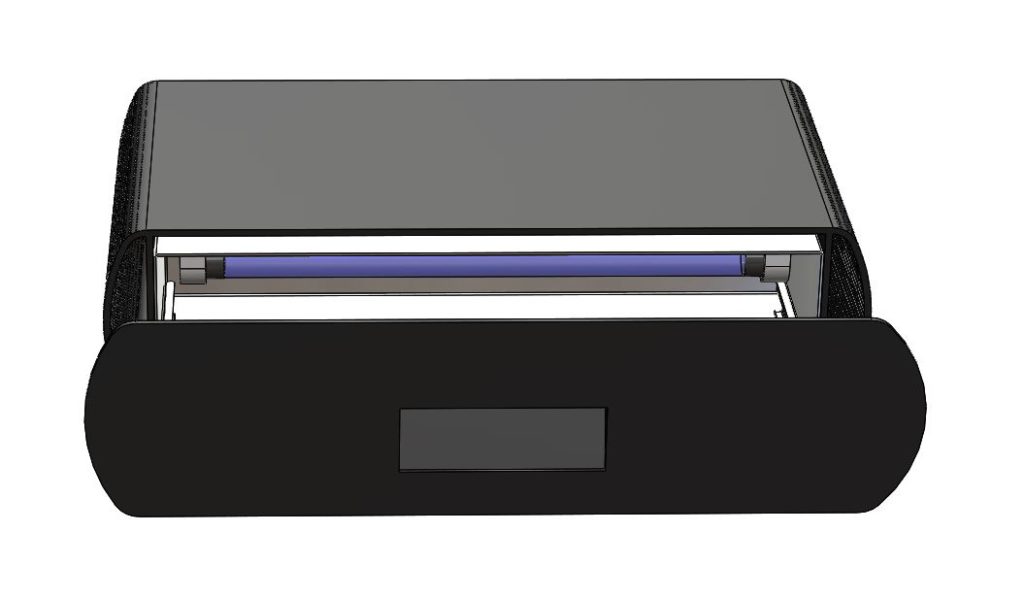
Design & Development of Conveyor Belt Surface Disinfection System Using Germicidal Ultraviolet (UV-C) Light
Present system uses UV-C light which disinfects & sanitizes the conveyor belt surfaces used in grocery industries. Developed the system as per Design for Manufacturing (DFM) using sheet metal design, part modeling & assembly in SolidWorks. Performed the flow & thermal simulations using SolidWorks Simulation, worked on patent writing & part drawings. Worked on the WHO & CDCs data and proposed a datasheet which explains why this system is more efficient & cost effective.


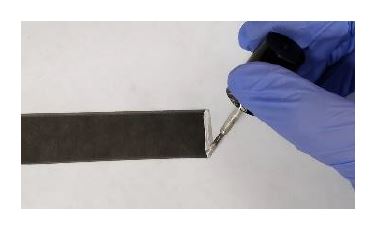

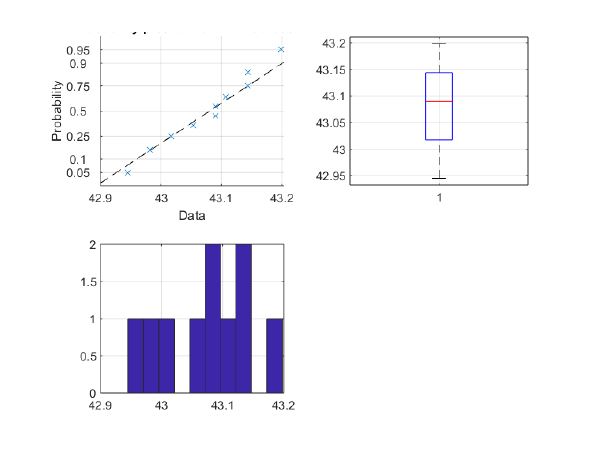
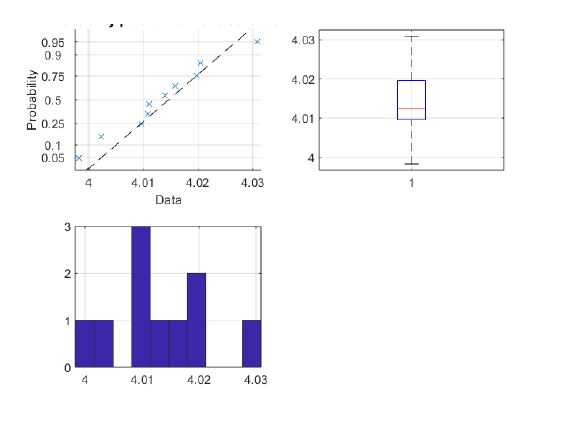

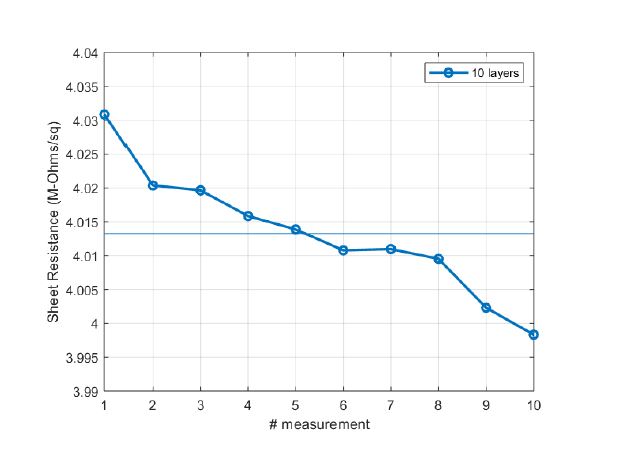
Study of Sheet Resistance/Gauge Factor on Inkjet-Printed CNT Layers (in collaboration with Intel)
Despite the high potential of carbon nanotube (CNT) as a replacement material for many state-of-the-art devices, in most of the cases, the choice of incorrect composition for CNT ink leads to improper printing or print failure. In this paper, the authors have investigated the quality of inkjet printing of multi-walled carbon nanotube (MWCNT) films with different types of MWCNT inks to measure their sheet resistances and predict the gauge factor for a sheet strain gauge. Results are validated by comparing experimental values with the reference values found from an extensive literature review. Ink solution used for printing (having best sheet resistance) is selected and the resistance is measured for different number of layers for print.
Controlling of a Self-Driving Car
This project implements and compares path tracking methods for controlling a model of an autonomous vehicle along a predetermined path. We compare the performance of a full state feedback controller, a proportional integral derivative controller and a model predictive controller on a kinematic bicycle model of a vehicle, using just the steering angle as the input. We also develop a pure pursuit controller and test it’s performance on the model. Additionally, we develop additional controllers to include the steering angle and the acceleration as inputs to the system.


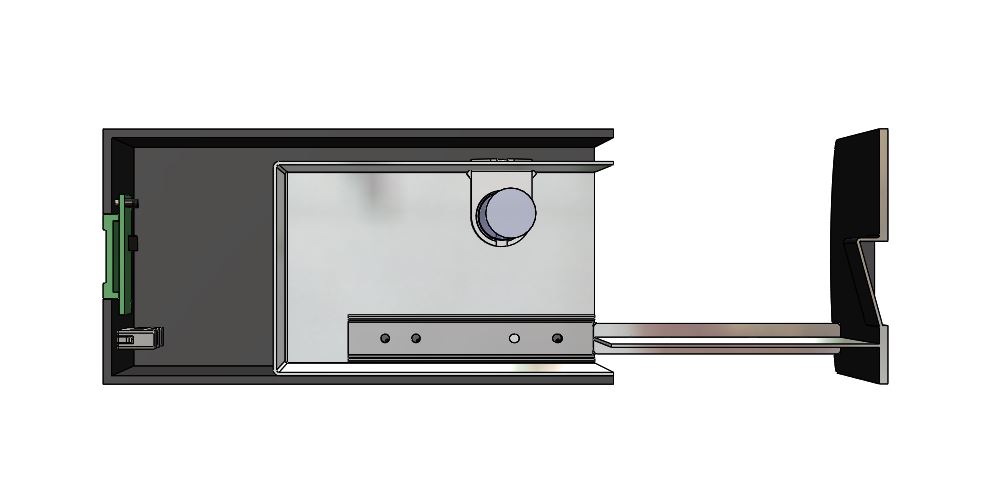
Designing an Ultraviolet Phone Sterilization System
Designing & Prototyping a Working Model (Replica) of an Outer Space Probe
This is the working model (replica) of the Mars Curiosity Rover. I have presented this model in the competition held by Inter University Center for Astronomy and Astrophysics (IUCAA) and got first prize in it. Also, I got a chance to exhibit this model on National Science Day in front of visitors and students. This model was also telecasted on a local news channel in India. This is operated using the remote controller, the head of the model can rotate 360 degrees clockwise and anticlockwise to record the video, the robotic arm can move up and down. I have designed and tested the Rocker-Bogie mechanism with six wheels attached to it. This complete model is prototyped in very less amount. I used foam material for the body as it’s cheap and lightweight. The Rocker-Bogie assembly and the frame is made up of PVC pipes. And all other parts are added from the medical scarp material.


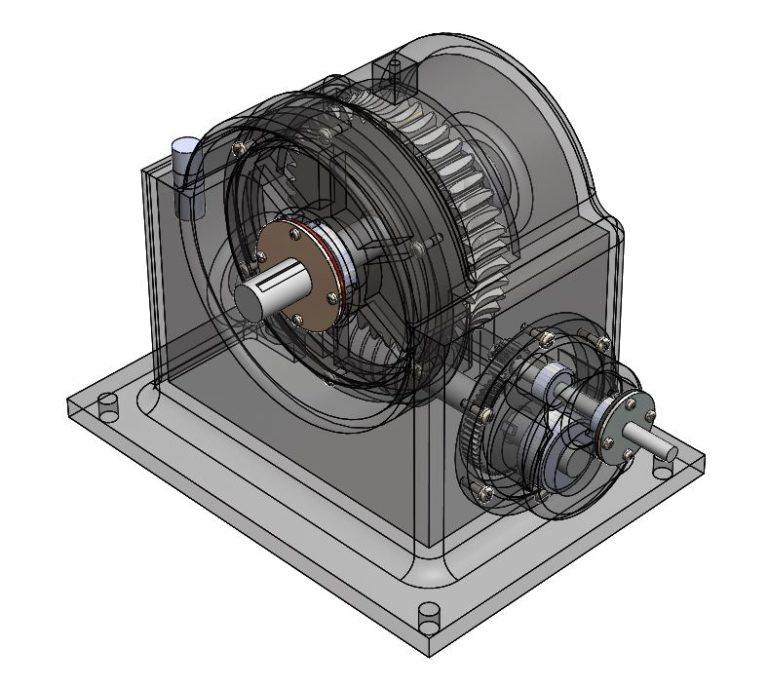

Design of an Industrial Gearbox
An industrial gearbox is an enclosed system that transmits mechanical energy to an output device. Gearboxes can modify their speed, torque, and other attributes to convert the energy into a useable format. Gearboxes are used in a variety of devices, for a broad range of purposes. These machines can slow the rate of rotation to increase torque and speed. The following will explain some of the different types of industrial gearboxes and how they are commonly used. I have performed 3D CAD solid modeling of the gearbox using SolidWorks, PTC Pro-E & applied DFMEA.
" It's not about ideas. It's about making ideas happen "
– Scott Belsky